A estratégia do comando por orientação do fluxo consiste em realizar o desacoplamento entre as duas variáveis essenciais da máquina assíncrona, a saber: o binário e o fluxo.
A sua interdependência é traduzida por:
|
(8) |
Para o controlo por orientação do fluxo, o eixo "d" é orientado segundo a resultante do fluxo do rotor:
 |
 |
(9) |
Se ![]() for mantido constante, no referencial ligado ao fluxo do rotor
obtém-se:
for mantido constante, no referencial ligado ao fluxo do rotor
obtém-se:
(10) |
Esta expressão mostra uma semelhança notável com a máquina C.C. Assim, pode controlar-se o binário através da componente q do vector da corrente do estator, por isso mesmo também denominada "componente do binário".
As relações:
|
(11) |
mostram que:
Não existe acoplamento das acções de Isd e Isd ® esta é a configuração das máquinas de C.C.
O controlo vectorial utiliza um modelo da máquina transformado de forma a que a ortogonalidade entre o fluxo e a componente activa da corrente seja mantida. Assim sendo, o binário electromagnético é dado por uma expressão escalar.
As funções essenciais a desempenhar pela estrutura do comando vectorial de forma a controlar o binário de uma máquina assíncrona, são:
O seguinte diagrama de blocos mostra os elementos básicos do comando vectorial.
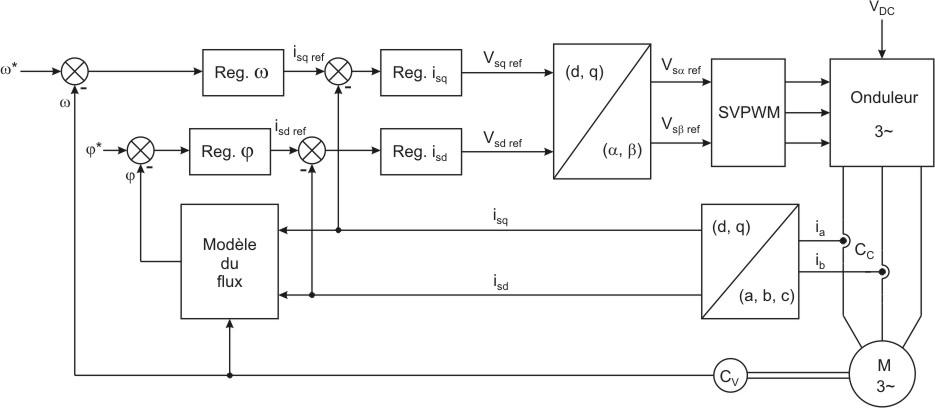
Fig. 4 - Representação esquemática do controlo vectorial - ilustração do princípio
As correntes do estator ia e ib, obtidas através dos sensores CC, entram no bloco das transformações Clarke - Park, sendo transformadas para o referencial (d, q).
Alterando a referência do fluxo, pode particularizar-se a estrutura para o comando vectorial dos motores assíncronos ou síncronos.
As saídas dos reguladores de velocidade e de fluxo, fornecem as referências isq ref e isd ref para as componentes (d, q) dos reguladores de corrente que, por sua vez, fornecem as tensões de referência Vsd ref e Vsq ref.
Estas grandezas, através da sua transformada de Park inversa, fornecem as tensões Vsa ref e Vsß ref que actuam o bloco de modulação SVPWM.
Este envia os impulsos de comando dos interruptores de potência do ondulador.É essencial o conhecimento da amplitude e da fase do fluxo!
Os métodos que se podem usar para o obter, são:
® a cadeia de regulação para a componente "d" da corrente corresponde à cadeia de regulação do fluxo (controlo indirecto).
Métodos que utilizam o cálculo do fluxo: métodos por estimação do fluxo ou através de observadores do fluxo.
Cadeia explícita de fluxo: pode adicionar-se um bloco suplementar dedicado ao tratamento do fluxo.
! ! ! Importante:
A estrutura/ o princípio apresentados são conhecidos como:
«controlo vectorial por fluxo do rotor»
= a estratégia mais utilizada de controlo vectorial .
O modelo da máquina assíncrona (incluindo a expressão do binário electromagnético) é tratado com base em diferentes referenciais:
Assim sendo, podem implementar-se controlos vectoriais:
O controlo realiza-se no referencial ligado ao fluxo em questão e as correntes estatóricas são obtidas no referencial associado.
Num tal sistema, as componentes da corrente estatórica são sempre ortogonais e semelhantes às corrente de excitação e do induzido das máquinas de corrente contínua.
Comando por fluxo estatórico: apresenta como inconveniente a medida de tensões estatóricas muito distorcidas no caso dor onduladores MLI.
As novas tendências para soluções de controlo vectorial:
